Parametrically driven resonator
One of the most famous effects displaced by nonlinear oscillators is parametric resonance, where the frequency of the linear resonator is modulated in time Phys. Rev. E 94, 022201 (2016). In the following we analyse this system, governed by the equations
where for completeness we also considered an external drive term
To implement this system in Harmonic Balance, we first import the library
using HarmonicBalance, PlotsSubsequently, we type define parameters in the problem and the oscillating amplitude function variables macro from Symbolics.jl
@variables ω₀ γ λ F η α ω t x(t)
natural_equation =
d(d(x, t), t) +
γ * d(x, t) +
(ω₀^2 - λ * cos(2 * ω * t)) * x +
α * x^3 +
η * d(x, t) * x^2
forces = F * cos(ω * t)
diff_eq = DifferentialEquation(natural_equation + forces, x)System of 1 differential equations
Variables: x(t)
Harmonic ansatz: x(t) => ;
Differential(t)(Differential(t)(x(t))) + F*cos(t*ω) + Differential(t)(x(t))*γ + x(t)*(-cos(2t*ω)*λ + ω₀^2) + (x(t)^3)*α + (x(t)^2)*Differential(t)(x(t))*η ~ 0Note that an equation of the form
can be brought to dimensionless form by rescaling the units as described in Phys. Rev. E 94, 022201 (2016).
We are interested in studying the response of the oscillator to parametric driving and forcing. In particular, we focus on the first parametric resonance of the system, i.e. operating around twice the bare frequency of the undriven oscillator add_harmonic command:
add_harmonic!(diff_eq, x, ω);and replacing this by the time independent (averaged) equations of motion. This can be simply done by writing
harmonic_eq = get_harmonic_equations(diff_eq)A set of 2 harmonic equations
Variables: u1(T), v1(T)
Parameters: ω, α, γ, λ, ω₀, F, η
Harmonic ansatz:
x(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
Harmonic equations:
F - (1//2)*u1(T)*λ + (2//1)*Differential(T)(v1(T))*ω + Differential(T)(u1(T))*γ - u1(T)*(ω^2) + u1(T)*(ω₀^2) + v1(T)*γ*ω + (3//4)*(u1(T)^3)*α + (3//4)*(u1(T)^2)*Differential(T)(u1(T))*η + (1//2)*u1(T)*Differential(T)(v1(T))*v1(T)*η + (3//4)*u1(T)*(v1(T)^2)*α + (1//4)*(v1(T)^2)*Differential(T)(u1(T))*η + (1//4)*(u1(T)^2)*v1(T)*η*ω + (1//4)*(v1(T)^3)*η*ω ~ 0
Differential(T)(v1(T))*γ + (1//2)*v1(T)*λ - (2//1)*Differential(T)(u1(T))*ω - u1(T)*γ*ω - v1(T)*(ω^2) + v1(T)*(ω₀^2) + (1//4)*(u1(T)^2)*Differential(T)(v1(T))*η + (3//4)*(u1(T)^2)*v1(T)*α + (1//2)*u1(T)*v1(T)*Differential(T)(u1(T))*η + (3//4)*Differential(T)(v1(T))*(v1(T)^2)*η + (3//4)*(v1(T)^3)*α - (1//4)*(u1(T)^3)*η*ω - (1//4)*u1(T)*(v1(T)^2)*η*ω ~ 0The output of these equations are consistent with the result found in the literature. Now we are interested in the linear response spectrum, which we can obtain from the solutions to the averaged equations (rotating frame) as a function of the external drive, after fixing all other parameters in the system. A call to get_steady_states then retrieves all steadystates found along the sweep employing the homotopy continuation method, which occurs in a complex space (see the nice HomotopyContinuation.jl docs)
1D parameters
We start with a varied set containing one parameter,
fixed = (ω₀ => 1.0, γ => 1e-2, λ => 5e-2, F => 1e-3, α => 1.0, η => 0.3)
varied = ω => range(0.9, 1.1, 100)
result = get_steady_states(harmonic_eq, varied, fixed)A steady state result for 100 parameter points
Solution branches: 5
of which real: 5
of which stable: 3
Classes: stable, physical, HopfIn get_steady_states, the default method WarmUp() initiates the homotopy in a generalised version of the harmonic equations, where parameters become random complex numbers. A parameter homotopy then follows to each of the frequency values TotalDegree, which initializes the homotopy in a total degree system (maximum number of roots), but needs to track significantly more homotopy paths and there is slower.
After solving the system, we can save the full output of the simulation and the model (e.g. symbolic expressions for the harmonic equations) into a file
HarmonicBalance.save("parametron_result.jld2", result);During the execution of get_steady_states, different solution branches are classified by their proximity in complex space, with subsequent filtering of real (physically acceptable solutions). In addition, the stability properties of each steady state is assessed from the eigenvalues of the Jacobian matrix. All this information can be succinctly represented in a 1D plot via
plot(result; x="ω", y="sqrt(u1^2 + v1^2)")
The user can also introduce custom classes based on parameter conditions via classify_solutions!. Plots can be overlaid and use keywords from Plots, MarkdownAST.LineBreak()
classify_solutions!(result, "sqrt(u1^2 + v1^2) > 0.1", "large")
plot(result, "sqrt(u1^2 + v1^2)"; class=["physical", "large"], style=:dash)
plot!(result, "sqrt(u1^2 + v1^2)"; not_class="large")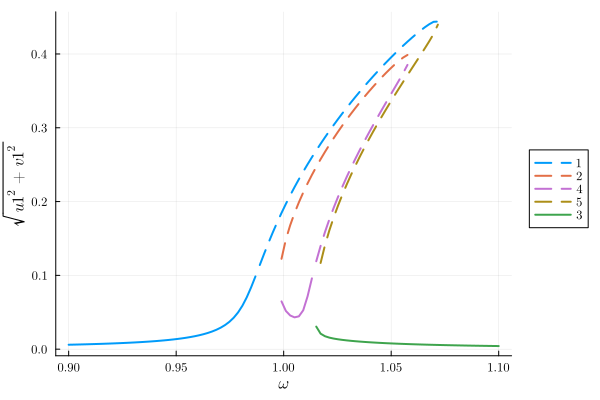
Alternatively, we may visualise all underlying solutions, including complex ones,
plot(result, "sqrt(u1^2 + v1^2)"; class="all")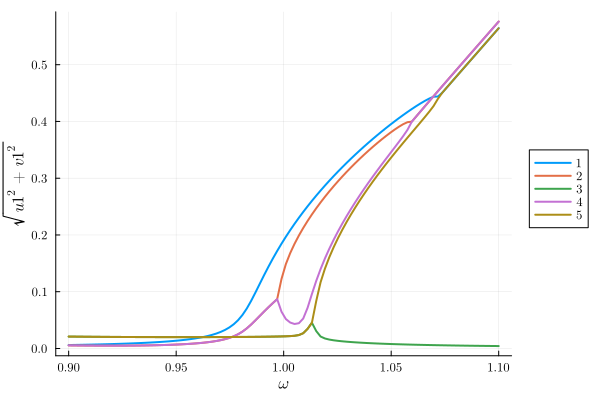
2D parameters
The parametrically driven oscillator boasts a stability diagram called "Arnold's tongues" delineating zones where the oscillator is stable from those where it is exponentially unstable (if the nonlinearity was absence). We can retrieve this diagram by calculating the steady states as a function of external detuning
To perform a 2D sweep over driving frequency fixed from before but include 2 variables in varied
fixed = (ω₀ => 1.0, γ => 1e-2, F => 1e-3, α => 1.0, η => 0.3)
varied = (ω => range(0.8, 1.2, 50), λ => range(0.001, 0.6, 50))
result_2D = get_steady_states(harmonic_eq, varied, fixed);
Solving for 2500 parameters... 76%|███████████████▏ | ETA: 0:00:00[K
# parameters solved: 1897[K
# paths tracked: 9485[K
[A
[A
[K[A
[K[A
Solving for 2500 parameters... 100%|████████████████████| Time: 0:00:00[K
# parameters solved: 2500[K
# paths tracked: 12500[KNow, we count the number of solutions for each point and represent the corresponding phase diagram in parameter space. This is done using plot_phase_diagram. Only counting stable solutions,
plot_phase_diagram(result_2D; class="stable")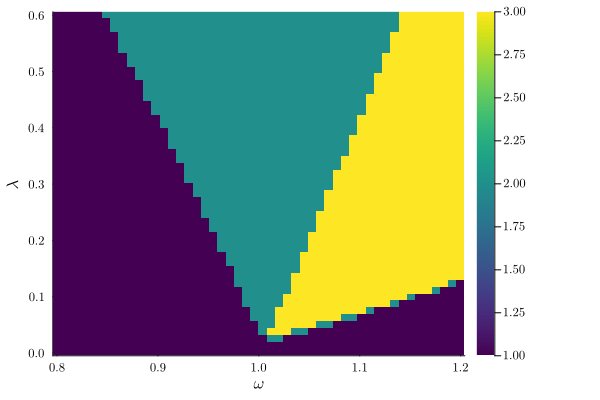
In addition to phase diagrams, we can plot functions of the solution. The syntax is identical to 1D plotting. Let us overlay 2 branches into a single plot,
# overlay branches with different colors
plot(result_2D, "sqrt(u1^2 + v1^2)"; branch=1, class="stable", camera=(60, -40))
plot!(result_2D, "sqrt(u1^2 + v1^2)"; branch=2, class="stable", color=:red)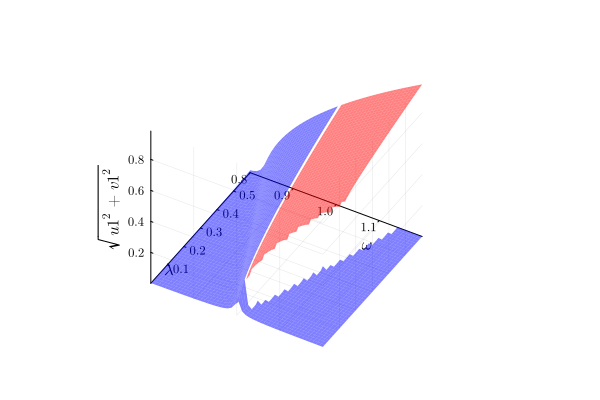
Note that solutions are ordered in parameter space according to their closest neighbors. Plots can again be limited to a given class (e.g stable solutions only) through the keyword argument class.
This page was generated using Literate.jl.