Time-dependent simulations
Most of HarmonicBalance.jl is focused on finding and analysing the steady states. Such states contain no information about transient behaviour, which is crucial to answer the following.
Given an initial condition, which steady state does the system evolve into?
How does the system behave if its parameters are varied in time?
It is straightforward to evolve the full equation of motion using an ODE solver. However, tracking oscillatory behaviour is computationally expensive.
In the background, we showed that nonlinear driven systems may be reduced to harmonic equations
As long as the chosen harmonics constituting
Here we primarily demonstrate on the parametrically driven oscillator.
We start by defining our system.
using HarmonicBalance, Plots
@variables ω0 γ λ F θ η α ω t x(t)
eq = d(d(x,t),t) + γ*d(x,t) + ω0^2*(1 - λ*cos(2*ω*t))*x + α*x^3 + η*d(x,t)*x^2 ~ F*cos(ω*t + θ)
diff_eq = DifferentialEquation(eq, x)
add_harmonic!(diff_eq, x, ω); # single-frequency ansatz
harmonic_eq = get_harmonic_equations(diff_eq);A set of 2 harmonic equations
Variables: u1(T), v1(T)
Parameters: ω, α, γ, λ, ω0, η, θ, F
Harmonic ansatz:
x(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
Harmonic equations:
(2//1)*Differential(T)(v1(T))*ω + Differential(T)(u1(T))*γ - u1(T)*(ω^2) + u1(T)*(ω0^2) + v1(T)*γ*ω + (3//4)*(u1(T)^3)*α + (3//4)*(u1(T)^2)*Differential(T)(u1(T))*η + (1//2)*u1(T)*Differential(T)(v1(T))*v1(T)*η + (3//4)*u1(T)*(v1(T)^2)*α - (1//2)*u1(T)*λ*(ω0^2) + (1//4)*(v1(T)^2)*Differential(T)(u1(T))*η + (1//4)*(u1(T)^2)*v1(T)*η*ω + (1//4)*(v1(T)^3)*η*ω ~ F*cos(θ)
Differential(T)(v1(T))*γ - (2//1)*Differential(T)(u1(T))*ω - u1(T)*γ*ω - v1(T)*(ω^2) + v1(T)*(ω0^2) + (1//4)*(u1(T)^2)*Differential(T)(v1(T))*η + (3//4)*(u1(T)^2)*v1(T)*α + (1//2)*u1(T)*v1(T)*Differential(T)(u1(T))*η + (3//4)*Differential(T)(v1(T))*(v1(T)^2)*η + (3//4)*(v1(T)^3)*α + (1//2)*v1(T)*λ*(ω0^2) - (1//4)*(u1(T)^3)*η*ω - (1//4)*u1(T)*(v1(T)^2)*η*ω ~ -F*sin(θ)The object harmonic_eq encodes the new effective differential equations.
We now wish to parse this input into OrdinaryDiffEq.jl and use its powerful ODE solvers. The desired object here is OrdinaryDiffEq.ODEProblem, which is then fed into OrdinaryDiffEq.solve.
Evolving from an initial condition
Given
For constant parameters, a HarmonicEquation object can be fed into the constructor of ODEProblem. The syntax is similar to DifferentialEquations.jl :
using OrdinaryDiffEqTsit5
u0 = [0.; 0.] # initial condition
fixed = (ω0 => 1.0, γ => 1e-2, λ => 5e-2, F => 1e-3, α => 1.0, η => 0.3, θ => 0, ω => 1.0) # parameter values
ode_problem = ODEProblem(harmonic_eq, fixed, u0 = u0, timespan = (0,1000))ODEProblem with uType Vector{Float64} and tType Int64. In-place: true
timespan: (0, 1000)
u0: 2-element Vector{Float64}:
0.0
0.0OrdinaryDiffEq.jl takes it from here - we only need to use solve.
time_evo = solve(ode_problem, Tsit5(), saveat=1.0);
plot(time_evo, ["u1", "v1"], harmonic_eq)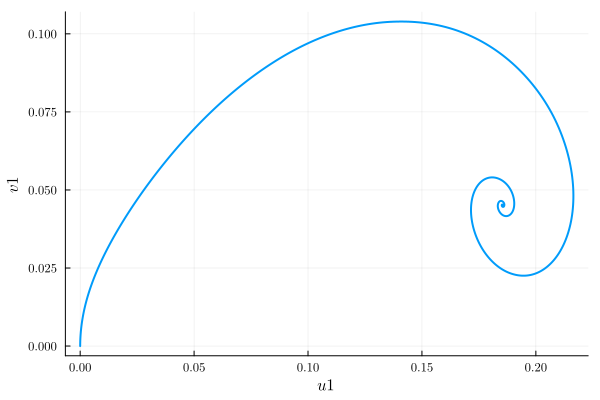
Running the above code with u0 = [0.2, 0.2] gives the plots
u0 = [0.2; 0.2] # initial condition
ode_problem = remake(ode_problem, u0 = u0)
time_evo = solve(ode_problem, Tsit5(), saveat=1.0);
plot(time_evo, ["u1", "v1"], harmonic_eq)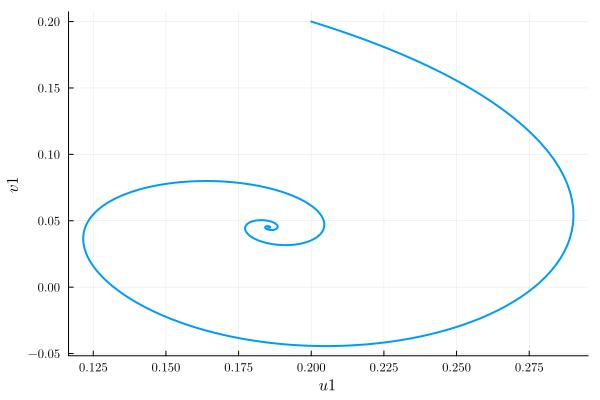
Let us compare this to the steady state diagram.
fixed = (ω0 => 1.0, γ => 1e-2, λ => 5e-2, F => 1e-3, α => 1.0, η => 0.3, θ => 0)
varied = ω => range(0.9, 1.1, 100)
result = get_steady_states(harmonic_eq, varied, fixed)
plot(result, "sqrt(u1^2 + v1^2)")
Clearly when evolving from u0 = [0., 0.], the system ends up in the low-amplitude branch 2. With u0 = [0.2, 0.2], the system ends up in branch 3.
Adiabatic parameter sweeps
Experimentally, the primary means of exploring the steady state landscape is an adiabatic sweep one or more of the system parameters. This takes the system along a solution branch. If this branch disappears or becomes unstable, a jump occurs.
The object AdiabaticSweep specifies a sweep, which is then used as an optional sweep keyword in the ODEProblem constructor.
sweep = AdiabaticSweep(ω => (0.9,1.1), (0, 2e4))AdiabaticSweep(Dict{Num, Function}(ω => TimeEvolution.var"#f#1"{Tuple{Float64, Float64}, Float64, Int64}((0.9, 1.1), 20000.0, 0)))The sweep linearly interpolates between
Let us now define a new ODEProblem which incorporates sweep and again use solve:
ode_problem = ODEProblem(harmonic_eq, fixed, sweep=sweep, u0=[0.1;0.0], timespan=(0, 2e4))
time_evo = solve(ode_problem, Tsit5(), saveat=100)
plot(time_evo, "sqrt(u1^2 + v1^2)", harmonic_eq)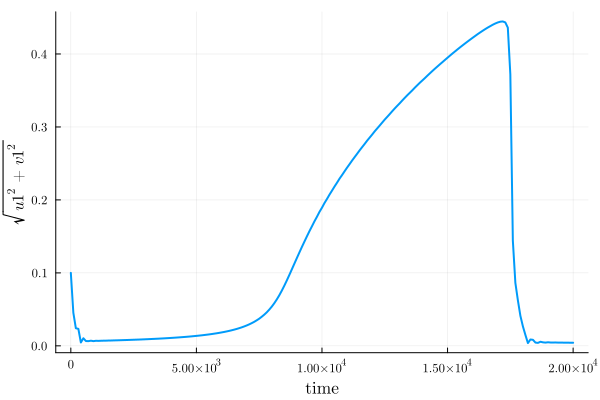
We see the system first evolves from the initial condition towards the low-amplitude steady state. The amplitude increases as the sweep proceeds, with a jump occurring around