Limit cycles
In contrast to the previous tutorials, limit cycle problems feature harmonic(s) whose numerical value is not imposed externally. We shall construct our HarmonicEquation as usual, but identify this harmonic as an extra variable, rather than a fixed parameter.
Non-driven system - the van der Pol oscillator
Here we solve the equation of motion of the van der Pol oscillator. This is a single-variable second-order ODE with continuous time-translation symmetry (i.e., no 'clock' imposing a frequency and/or phase), which displays periodic solutions known as relaxation oscillations. For more detail, refer also to arXiv:2308.06092.
using HarmonicBalance, Plots
@variables ω_lc, t, ω0, x(t), μ
diff_eq = DifferentialEquation(d(d(x,t),t) - μ*(1-x^2) * d(x,t) + x, x)System of 1 differential equations
Variables: x(t)
Harmonic ansatz: x(t) => ;
x(t) + Differential(t)(Differential(t)(x(t))) - (1 - (x(t)^2))*Differential(t)(x(t))*μ ~ 0Choosing to expand the motion of
foreach(1:2:5) do i
add_harmonic!(diff_eq, x, i*ω_lc)
end;and obtain 6 harmonic equations,
harmonic_eq = get_harmonic_equations(diff_eq)A set of 6 harmonic equations
Variables: u1(T), v1(T), u2(T), v2(T), u3(T), v3(T)
Parameters: ω_lc, μ
Harmonic ansatz:
x(t) = u1(T)*cos(ω_lct) + v1(T)*sin(ω_lct) + u2(T)*cos(3ω_lct) + v2(T)*sin(3ω_lct) + u3(T)*cos(5ω_lct) + v3(T)*sin(5ω_lct)
Harmonic equations:
u1(T) + (2//1)*Differential(T)(v1(T))*ω_lc - Differential(T)(u1(T))*μ - u1(T)*(ω_lc^2) - v1(T)*μ*ω_lc + (1//4)*(u1(T)^2)*Differential(T)(u2(T))*μ + (3//4)*(u1(T)^2)*Differential(T)(u1(T))*μ + u1(T)*Differential(T)(u3(T))*u3(T)*μ + (1//2)*u1(T)*Differential(T)(u3(T))*u2(T)*μ + u1(T)*Differential(T)(v3(T))*v3(T)*μ + (1//2)*u1(T)*Differential(T)(v3(T))*v2(T)*μ + (1//2)*u1(T)*v3(T)*Differential(T)(v2(T))*μ + (1//2)*u1(T)*Differential(T)(v1(T))*v2(T)*μ + (1//2)*u1(T)*Differential(T)(v1(T))*v1(T)*μ + u1(T)*v2(T)*Differential(T)(v2(T))*μ + (1//2)*u1(T)*v1(T)*Differential(T)(v2(T))*μ + (1//2)*u1(T)*Differential(T)(u2(T))*u3(T)*μ + u1(T)*Differential(T)(u2(T))*u2(T)*μ + (1//2)*u1(T)*Differential(T)(u1(T))*u2(T)*μ - (1//4)*Differential(T)(u3(T))*(v2(T)^2)*μ - (1//2)*Differential(T)(u3(T))*v2(T)*v1(T)*μ + (1//4)*Differential(T)(u3(T))*(u2(T)^2)*μ + (1//2)*Differential(T)(v3(T))*v2(T)*u2(T)*μ + (1//2)*Differential(T)(v3(T))*v1(T)*u2(T)*μ + (1//2)*(v3(T)^2)*Differential(T)(u1(T))*μ + (1//2)*v3(T)*Differential(T)(v1(T))*u2(T)*μ + (1//2)*v3(T)*v2(T)*Differential(T)(u2(T))*μ + (1//2)*v3(T)*v2(T)*Differential(T)(u1(T))*μ + (1//2)*v3(T)*v1(T)*Differential(T)(u2(T))*μ + (1//2)*v3(T)*u2(T)*Differential(T)(v2(T))*μ - (1//2)*Differential(T)(v1(T))*v2(T)*u3(T)*μ - (1//2)*Differential(T)(v1(T))*v1(T)*u2(T)*μ + (1//2)*(v2(T)^2)*Differential(T)(u1(T))*μ + (1//2)*v2(T)*v1(T)*Differential(T)(u1(T))*μ - (1//2)*v2(T)*u3(T)*Differential(T)(v2(T))*μ - (1//4)*(v1(T)^2)*Differential(T)(u2(T))*μ + (1//4)*(v1(T)^2)*Differential(T)(u1(T))*μ - (1//2)*v1(T)*u3(T)*Differential(T)(v2(T))*μ + (1//2)*Differential(T)(u2(T))*u3(T)*u2(T)*μ + (1//2)*(u3(T)^2)*Differential(T)(u1(T))*μ + (1//2)*u3(T)*Differential(T)(u1(T))*u2(T)*μ + (1//2)*Differential(T)(u1(T))*(u2(T)^2)*μ + (1//4)*(u1(T)^2)*v2(T)*μ*ω_lc + (1//4)*(u1(T)^2)*v1(T)*μ*ω_lc + (1//2)*u1(T)*v3(T)*u2(T)*μ*ω_lc - (1//2)*u1(T)*v2(T)*u3(T)*μ*ω_lc - (1//2)*u1(T)*v1(T)*u2(T)*μ*ω_lc + (1//2)*(v3(T)^2)*v1(T)*μ*ω_lc + (1//4)*v3(T)*(v2(T)^2)*μ*ω_lc - (1//2)*v3(T)*v2(T)*v1(T)*μ*ω_lc - (1//4)*v3(T)*(u2(T)^2)*μ*ω_lc + (1//2)*(v2(T)^2)*v1(T)*μ*ω_lc - (1//4)*v2(T)*(v1(T)^2)*μ*ω_lc + (1//2)*v2(T)*u3(T)*u2(T)*μ*ω_lc + (1//4)*(v1(T)^3)*μ*ω_lc + (1//2)*v1(T)*(u3(T)^2)*μ*ω_lc - (1//2)*v1(T)*u3(T)*u2(T)*μ*ω_lc + (1//2)*v1(T)*(u2(T)^2)*μ*ω_lc ~ 0
v1(T) - Differential(T)(v1(T))*μ - (2//1)*Differential(T)(u1(T))*ω_lc + u1(T)*μ*ω_lc - v1(T)*(ω_lc^2) + (1//4)*(u1(T)^2)*Differential(T)(v1(T))*μ + (1//4)*(u1(T)^2)*Differential(T)(v2(T))*μ - (1//2)*u1(T)*Differential(T)(u3(T))*v2(T)*μ + (1//2)*u1(T)*Differential(T)(v3(T))*u2(T)*μ + (1//2)*u1(T)*v3(T)*Differential(T)(u2(T))*μ - (1//2)*u1(T)*Differential(T)(v1(T))*u2(T)*μ + (1//2)*u1(T)*v2(T)*Differential(T)(u1(T))*μ - (1//2)*u1(T)*v1(T)*Differential(T)(u2(T))*μ + (1//2)*u1(T)*v1(T)*Differential(T)(u1(T))*μ - (1//2)*u1(T)*u3(T)*Differential(T)(v2(T))*μ + (1//2)*Differential(T)(u3(T))*v2(T)*u2(T)*μ + Differential(T)(u3(T))*v1(T)*u3(T)*μ - (1//2)*Differential(T)(u3(T))*v1(T)*u2(T)*μ + Differential(T)(v3(T))*v3(T)*v1(T)*μ + (1//4)*Differential(T)(v3(T))*(v2(T)^2)*μ - (1//2)*Differential(T)(v3(T))*v2(T)*v1(T)*μ - (1//4)*Differential(T)(v3(T))*(u2(T)^2)*μ + (1//2)*(v3(T)^2)*Differential(T)(v1(T))*μ - (1//2)*v3(T)*Differential(T)(v1(T))*v2(T)*μ + (1//2)*v3(T)*v2(T)*Differential(T)(v2(T))*μ - (1//2)*v3(T)*v1(T)*Differential(T)(v2(T))*μ - (1//2)*v3(T)*Differential(T)(u2(T))*u2(T)*μ + (1//2)*v3(T)*Differential(T)(u1(T))*u2(T)*μ + (1//2)*Differential(T)(v1(T))*(v2(T)^2)*μ - (1//2)*Differential(T)(v1(T))*v2(T)*v1(T)*μ + (3//4)*Differential(T)(v1(T))*(v1(T)^2)*μ + (1//2)*Differential(T)(v1(T))*(u3(T)^2)*μ - (1//2)*Differential(T)(v1(T))*u3(T)*u2(T)*μ + (1//2)*Differential(T)(v1(T))*(u2(T)^2)*μ + v2(T)*v1(T)*Differential(T)(v2(T))*μ + (1//2)*v2(T)*Differential(T)(u2(T))*u3(T)*μ - (1//2)*v2(T)*u3(T)*Differential(T)(u1(T))*μ - (1//4)*(v1(T)^2)*Differential(T)(v2(T))*μ - (1//2)*v1(T)*Differential(T)(u2(T))*u3(T)*μ + v1(T)*Differential(T)(u2(T))*u2(T)*μ - (1//2)*v1(T)*Differential(T)(u1(T))*u2(T)*μ + (1//2)*u3(T)*u2(T)*Differential(T)(v2(T))*μ - (1//4)*(u1(T)^3)*μ*ω_lc - (1//4)*(u1(T)^2)*u2(T)*μ*ω_lc - (1//2)*u1(T)*(v3(T)^2)*μ*ω_lc - (1//2)*u1(T)*v3(T)*v2(T)*μ*ω_lc - (1//2)*u1(T)*(v2(T)^2)*μ*ω_lc - (1//2)*u1(T)*v2(T)*v1(T)*μ*ω_lc - (1//4)*u1(T)*(v1(T)^2)*μ*ω_lc - (1//2)*u1(T)*(u3(T)^2)*μ*ω_lc - (1//2)*u1(T)*u3(T)*u2(T)*μ*ω_lc - (1//2)*u1(T)*(u2(T)^2)*μ*ω_lc - (1//2)*v3(T)*v2(T)*u2(T)*μ*ω_lc - (1//2)*v3(T)*v1(T)*u2(T)*μ*ω_lc + (1//4)*(v2(T)^2)*u3(T)*μ*ω_lc + (1//2)*v2(T)*v1(T)*u3(T)*μ*ω_lc + (1//4)*(v1(T)^2)*u2(T)*μ*ω_lc - (1//4)*u3(T)*(u2(T)^2)*μ*ω_lc ~ 0
u2(T) - Differential(T)(u2(T))*μ + (6//1)*Differential(T)(v2(T))*ω_lc - (3//1)*v2(T)*μ*ω_lc - (9//1)*u2(T)*(ω_lc^2) + (1//4)*(u1(T)^2)*Differential(T)(u3(T))*μ + (1//2)*(u1(T)^2)*Differential(T)(u2(T))*μ + (1//4)*(u1(T)^2)*Differential(T)(u1(T))*μ + (1//2)*u1(T)*Differential(T)(u3(T))*u2(T)*μ + (1//2)*u1(T)*Differential(T)(v3(T))*v2(T)*μ + (1//2)*u1(T)*Differential(T)(v3(T))*v1(T)*μ + (1//2)*u1(T)*v3(T)*Differential(T)(v1(T))*μ + (1//2)*u1(T)*v3(T)*Differential(T)(v2(T))*μ - (1//2)*u1(T)*Differential(T)(v1(T))*v1(T)*μ + (1//2)*u1(T)*Differential(T)(u2(T))*u3(T)*μ + (1//2)*u1(T)*u3(T)*Differential(T)(u1(T))*μ + u1(T)*Differential(T)(u1(T))*u2(T)*μ + (1//2)*Differential(T)(u3(T))*v2(T)*v1(T)*μ - (1//4)*Differential(T)(u3(T))*(v1(T)^2)*μ + Differential(T)(u3(T))*u3(T)*u2(T)*μ + Differential(T)(v3(T))*v3(T)*u2(T)*μ - (1//2)*Differential(T)(v3(T))*v1(T)*u2(T)*μ + (1//2)*(v3(T)^2)*Differential(T)(u2(T))*μ - (1//2)*v3(T)*Differential(T)(v1(T))*u2(T)*μ + (1//2)*v3(T)*v2(T)*Differential(T)(u1(T))*μ - (1//2)*v3(T)*v1(T)*Differential(T)(u2(T))*μ + (1//2)*v3(T)*v1(T)*Differential(T)(u1(T))*μ + (1//2)*Differential(T)(v1(T))*v2(T)*u3(T)*μ - (1//2)*Differential(T)(v1(T))*v1(T)*u3(T)*μ + Differential(T)(v1(T))*v1(T)*u2(T)*μ + (1//4)*(v2(T)^2)*Differential(T)(u2(T))*μ + (1//2)*v2(T)*u2(T)*Differential(T)(v2(T))*μ + (1//2)*(v1(T)^2)*Differential(T)(u2(T))*μ - (1//4)*(v1(T)^2)*Differential(T)(u1(T))*μ + (1//2)*v1(T)*u3(T)*Differential(T)(v2(T))*μ + (1//2)*Differential(T)(u2(T))*(u3(T)^2)*μ + (3//4)*Differential(T)(u2(T))*(u2(T)^2)*μ + (1//2)*u3(T)*Differential(T)(u1(T))*u2(T)*μ + (3//4)*(u1(T)^2)*v3(T)*μ*ω_lc + (3//2)*(u1(T)^2)*v2(T)*μ*ω_lc + (3//4)*(u1(T)^2)*v1(T)*μ*ω_lc + (3//2)*u1(T)*v3(T)*u2(T)*μ*ω_lc - (3//2)*u1(T)*v2(T)*u3(T)*μ*ω_lc - (3//2)*u1(T)*v1(T)*u3(T)*μ*ω_lc + (3//2)*(v3(T)^2)*v2(T)*μ*ω_lc + (3//2)*v3(T)*v2(T)*v1(T)*μ*ω_lc - (3//4)*v3(T)*(v1(T)^2)*μ*ω_lc + (3//4)*(v2(T)^3)*μ*ω_lc + (3//2)*v2(T)*(v1(T)^2)*μ*ω_lc + (3//2)*v2(T)*(u3(T)^2)*μ*ω_lc + (3//4)*v2(T)*(u2(T)^2)*μ*ω_lc - (1//4)*(v1(T)^3)*μ*ω_lc + (3//2)*v1(T)*u3(T)*u2(T)*μ*ω_lc ~ 0
v2(T) - (6//1)*Differential(T)(u2(T))*ω_lc - Differential(T)(v2(T))*μ - (9//1)*v2(T)*(ω_lc^2) + (3//1)*u2(T)*μ*ω_lc + (1//4)*(u1(T)^2)*Differential(T)(v3(T))*μ + (1//4)*(u1(T)^2)*Differential(T)(v1(T))*μ + (1//2)*(u1(T)^2)*Differential(T)(v2(T))*μ - (1//2)*u1(T)*Differential(T)(u3(T))*v2(T)*μ - (1//2)*u1(T)*Differential(T)(u3(T))*v1(T)*μ + (1//2)*u1(T)*Differential(T)(v3(T))*u2(T)*μ + (1//2)*u1(T)*v3(T)*Differential(T)(u2(T))*μ + (1//2)*u1(T)*v3(T)*Differential(T)(u1(T))*μ - (1//2)*u1(T)*Differential(T)(v1(T))*u3(T)*μ + u1(T)*v2(T)*Differential(T)(u1(T))*μ + (1//2)*u1(T)*v1(T)*Differential(T)(u1(T))*μ - (1//2)*u1(T)*u3(T)*Differential(T)(v2(T))*μ + Differential(T)(u3(T))*v2(T)*u3(T)*μ + (1//2)*Differential(T)(u3(T))*v1(T)*u2(T)*μ + Differential(T)(v3(T))*v3(T)*v2(T)*μ + (1//2)*Differential(T)(v3(T))*v2(T)*v1(T)*μ - (1//4)*Differential(T)(v3(T))*(v1(T)^2)*μ + (1//2)*(v3(T)^2)*Differential(T)(v2(T))*μ + (1//2)*v3(T)*Differential(T)(v1(T))*v2(T)*μ - (1//2)*v3(T)*Differential(T)(v1(T))*v1(T)*μ + (1//2)*v3(T)*v1(T)*Differential(T)(v2(T))*μ + (1//2)*v3(T)*Differential(T)(u1(T))*u2(T)*μ + Differential(T)(v1(T))*v2(T)*v1(T)*μ - (1//4)*Differential(T)(v1(T))*(v1(T)^2)*μ + (1//2)*Differential(T)(v1(T))*u3(T)*u2(T)*μ + (3//4)*(v2(T)^2)*Differential(T)(v2(T))*μ + (1//2)*v2(T)*Differential(T)(u2(T))*u2(T)*μ - (1//2)*v2(T)*u3(T)*Differential(T)(u1(T))*μ + (1//2)*(v1(T)^2)*Differential(T)(v2(T))*μ + (1//2)*v1(T)*Differential(T)(u2(T))*u3(T)*μ - (1//2)*v1(T)*u3(T)*Differential(T)(u1(T))*μ + (1//2)*(u3(T)^2)*Differential(T)(v2(T))*μ + (1//4)*(u2(T)^2)*Differential(T)(v2(T))*μ - (1//4)*(u1(T)^3)*μ*ω_lc - (3//4)*(u1(T)^2)*u3(T)*μ*ω_lc - (3//2)*(u1(T)^2)*u2(T)*μ*ω_lc - (3//2)*u1(T)*v3(T)*v2(T)*μ*ω_lc - (3//2)*u1(T)*v3(T)*v1(T)*μ*ω_lc + (3//4)*u1(T)*(v1(T)^2)*μ*ω_lc - (3//2)*u1(T)*u3(T)*u2(T)*μ*ω_lc - (3//2)*(v3(T)^2)*u2(T)*μ*ω_lc + (3//2)*v3(T)*v1(T)*u2(T)*μ*ω_lc - (3//4)*(v2(T)^2)*u2(T)*μ*ω_lc - (3//2)*v2(T)*v1(T)*u3(T)*μ*ω_lc + (3//4)*(v1(T)^2)*u3(T)*μ*ω_lc - (3//2)*(v1(T)^2)*u2(T)*μ*ω_lc - (3//2)*(u3(T)^2)*u2(T)*μ*ω_lc - (3//4)*(u2(T)^3)*μ*ω_lc ~ 0
u3(T) - Differential(T)(u3(T))*μ + (10//1)*Differential(T)(v3(T))*ω_lc - (5//1)*v3(T)*μ*ω_lc - (25//1)*u3(T)*(ω_lc^2) + (1//2)*(u1(T)^2)*Differential(T)(u3(T))*μ + (1//4)*(u1(T)^2)*Differential(T)(u2(T))*μ - (1//2)*u1(T)*Differential(T)(v1(T))*v2(T)*μ - (1//2)*u1(T)*v2(T)*Differential(T)(v2(T))*μ - (1//2)*u1(T)*v1(T)*Differential(T)(v2(T))*μ + (1//2)*u1(T)*Differential(T)(u2(T))*u2(T)*μ + u1(T)*u3(T)*Differential(T)(u1(T))*μ + (1//2)*u1(T)*Differential(T)(u1(T))*u2(T)*μ + (1//4)*Differential(T)(u3(T))*(v3(T)^2)*μ + (1//2)*Differential(T)(u3(T))*(v2(T)^2)*μ + (1//2)*Differential(T)(u3(T))*(v1(T)^2)*μ + (3//4)*Differential(T)(u3(T))*(u3(T)^2)*μ + (1//2)*Differential(T)(u3(T))*(u2(T)^2)*μ + (1//2)*Differential(T)(v3(T))*v3(T)*u3(T)*μ + (1//2)*Differential(T)(v1(T))*v2(T)*u2(T)*μ + Differential(T)(v1(T))*v1(T)*u3(T)*μ - (1//2)*Differential(T)(v1(T))*v1(T)*u2(T)*μ - (1//4)*(v2(T)^2)*Differential(T)(u1(T))*μ + (1//2)*v2(T)*v1(T)*Differential(T)(u2(T))*μ - (1//2)*v2(T)*v1(T)*Differential(T)(u1(T))*μ + v2(T)*u3(T)*Differential(T)(v2(T))*μ - (1//4)*(v1(T)^2)*Differential(T)(u2(T))*μ + (1//2)*v1(T)*u2(T)*Differential(T)(v2(T))*μ + Differential(T)(u2(T))*u3(T)*u2(T)*μ + (1//4)*Differential(T)(u1(T))*(u2(T)^2)*μ + (5//2)*(u1(T)^2)*v3(T)*μ*ω_lc + (5//4)*(u1(T)^2)*v2(T)*μ*ω_lc + (5//2)*u1(T)*v2(T)*u2(T)*μ*ω_lc + (5//2)*u1(T)*v1(T)*u2(T)*μ*ω_lc + (5//4)*(v3(T)^3)*μ*ω_lc + (5//2)*v3(T)*(v2(T)^2)*μ*ω_lc + (5//2)*v3(T)*(v1(T)^2)*μ*ω_lc + (5//4)*v3(T)*(u3(T)^2)*μ*ω_lc + (5//2)*v3(T)*(u2(T)^2)*μ*ω_lc + (5//4)*(v2(T)^2)*v1(T)*μ*ω_lc - (5//4)*v2(T)*(v1(T)^2)*μ*ω_lc - (5//4)*v1(T)*(u2(T)^2)*μ*ω_lc ~ 0
v3(T) - (10//1)*Differential(T)(u3(T))*ω_lc - Differential(T)(v3(T))*μ - (25//1)*v3(T)*(ω_lc^2) + (5//1)*u3(T)*μ*ω_lc + (1//2)*(u1(T)^2)*Differential(T)(v3(T))*μ + (1//4)*(u1(T)^2)*Differential(T)(v2(T))*μ + u1(T)*v3(T)*Differential(T)(u1(T))*μ + (1//2)*u1(T)*Differential(T)(v1(T))*u2(T)*μ + (1//2)*u1(T)*v2(T)*Differential(T)(u2(T))*μ + (1//2)*u1(T)*v2(T)*Differential(T)(u1(T))*μ + (1//2)*u1(T)*v1(T)*Differential(T)(u2(T))*μ + (1//2)*u1(T)*u2(T)*Differential(T)(v2(T))*μ + (1//2)*Differential(T)(u3(T))*v3(T)*u3(T)*μ + (3//4)*Differential(T)(v3(T))*(v3(T)^2)*μ + (1//2)*Differential(T)(v3(T))*(v2(T)^2)*μ + (1//2)*Differential(T)(v3(T))*(v1(T)^2)*μ + (1//4)*Differential(T)(v3(T))*(u3(T)^2)*μ + (1//2)*Differential(T)(v3(T))*(u2(T)^2)*μ + v3(T)*Differential(T)(v1(T))*v1(T)*μ + v3(T)*v2(T)*Differential(T)(v2(T))*μ + v3(T)*Differential(T)(u2(T))*u2(T)*μ + (1//4)*Differential(T)(v1(T))*(v2(T)^2)*μ - (1//2)*Differential(T)(v1(T))*v2(T)*v1(T)*μ - (1//4)*Differential(T)(v1(T))*(u2(T)^2)*μ + (1//2)*v2(T)*v1(T)*Differential(T)(v2(T))*μ + (1//2)*v2(T)*Differential(T)(u1(T))*u2(T)*μ - (1//4)*(v1(T)^2)*Differential(T)(v2(T))*μ - (1//2)*v1(T)*Differential(T)(u2(T))*u2(T)*μ + (1//2)*v1(T)*Differential(T)(u1(T))*u2(T)*μ - (5//2)*(u1(T)^2)*u3(T)*μ*ω_lc - (5//4)*(u1(T)^2)*u2(T)*μ*ω_lc + (5//4)*u1(T)*(v2(T)^2)*μ*ω_lc + (5//2)*u1(T)*v2(T)*v1(T)*μ*ω_lc - (5//4)*u1(T)*(u2(T)^2)*μ*ω_lc - (5//4)*(v3(T)^2)*u3(T)*μ*ω_lc - (5//2)*(v2(T)^2)*u3(T)*μ*ω_lc - (5//2)*v2(T)*v1(T)*u2(T)*μ*ω_lc - (5//2)*(v1(T)^2)*u3(T)*μ*ω_lc + (5//4)*(v1(T)^2)*u2(T)*μ*ω_lc - (5//4)*(u3(T)^3)*μ*ω_lc - (5//2)*u3(T)*(u2(T)^2)*μ*ω_lc ~ 0So far, ω_lc and calling get_steady_states.
get_steady_states(harmonic_eq, μ => 1:0.1:5, ω_lc => 1.2)gives a single solution with zero amplitude.
Taking instead get_limit_cycles, marking the limit cycle harmonic as a keyword argument,
result = get_limit_cycles(harmonic_eq, μ => 1:0.1:5, (), ω_lc)A steady state result for 41 parameter points
Solution branches: 92
of which real: 4
of which stable: 4
Classes: unique_cycle, stable, physical, HopfThe results show a fourfold degeneracy of solutions:
plot(result, y="ω_lc")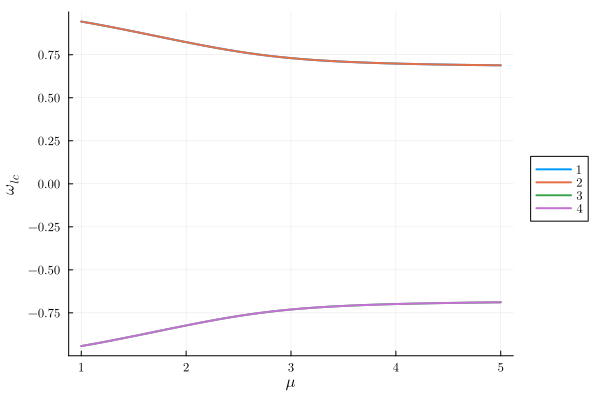
The automatically created solution class unique_cycle filters the degeneracy out:
plot(result, y="ω_lc", class="unique_cycle")
Driven system - coupled Duffings
So far, we have largely focused on finding and analysing steady states, i.e., fixed points of the harmonic equations, which satisfy
Fixed points are however merely a subset of possible solutions of the slow-flow equations – strictly speaking, solutions where
Such solutions, known as limit cycles, typically appear as closed periodic trajectories of the harmonic variables
Here we reconstruct the results of Zambon et al., Phys Rev. A 102, 023526 (2020), where limit cycles are shown to appear in a system of two coupled nonlinear oscillators. In this problem, two oscillators
using HarmonicBalance
@variables γ F α ω0 F0 η ω J t x(t) y(t);
eqs = [d(x,t,2) + γ*d(x,t) + ω0^2*x + α*x^3 + 2*J*ω0*(x-y) - F0*cos(ω*t),
d(y,t,2) + γ*d(y,t) + ω0^2*y + α*y^3 + 2*J*ω0*(y-x) - η*F0*cos(ω*t)]
diff_eq = DifferentialEquation(eqs, [x,y])System of 2 differential equations
Variables: x(t), y(t)
Harmonic ansatz: x(t) => ; y(t) => ;
Differential(t)(Differential(t)(x(t))) - F0*cos(t*ω) + Differential(t)(x(t))*γ + 2J*(x(t) - y(t))*ω0 + x(t)*(ω0^2) + (x(t)^3)*α ~ 0
Differential(t)(Differential(t)(y(t))) + Differential(t)(y(t))*γ - F0*cos(t*ω)*η + 2J*(-x(t) + y(t))*ω0 + y(t)*(ω0^2) + (y(t)^3)*α ~ 0The analysis of Zambon et al. uses a frame rotating at the pump frequency
add_harmonic!(diff_eq, x, ω)
add_harmonic!(diff_eq, y, ω)
harmonic_eq = get_harmonic_equations(diff_eq)A set of 4 harmonic equations
Variables: u1(T), v1(T), u2(T), v2(T)
Parameters: ω, ω0, J, α, γ, F0, η
Harmonic ansatz:
x(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
y(t) = u2(T)*cos(ωt) + v2(T)*sin(ωt)
Harmonic equations:
-F0 + (2//1)*Differential(T)(v1(T))*ω + Differential(T)(u1(T))*γ + (2//1)*J*u1(T)*ω0 - (2//1)*J*u2(T)*ω0 - u1(T)*(ω^2) + u1(T)*(ω0^2) + v1(T)*γ*ω + (3//4)*(u1(T)^3)*α + (3//4)*u1(T)*(v1(T)^2)*α ~ 0
Differential(T)(v1(T))*γ - (2//1)*Differential(T)(u1(T))*ω - (2//1)*J*v2(T)*ω0 + (2//1)*J*v1(T)*ω0 - u1(T)*γ*ω - v1(T)*(ω^2) + v1(T)*(ω0^2) + (3//4)*(u1(T)^2)*v1(T)*α + (3//4)*(v1(T)^3)*α ~ 0
-F0*η + Differential(T)(u2(T))*γ + (2//1)*Differential(T)(v2(T))*ω - (2//1)*J*u1(T)*ω0 + (2//1)*J*u2(T)*ω0 + v2(T)*γ*ω - u2(T)*(ω^2) + u2(T)*(ω0^2) + (3//4)*(v2(T)^2)*u2(T)*α + (3//4)*(u2(T)^3)*α ~ 0
-(2//1)*Differential(T)(u2(T))*ω + Differential(T)(v2(T))*γ + (2//1)*J*v2(T)*ω0 - (2//1)*J*v1(T)*ω0 - v2(T)*(ω^2) + v2(T)*(ω0^2) - u2(T)*γ*ω + (3//4)*(v2(T)^3)*α + (3//4)*v2(T)*(u2(T)^2)*α ~ 0Solving for a range of drive amplitudes
fixed = (
ω0 => 1.4504859, # natural frequency of separate modes (in paper's notation, ħω0 - J)
γ => 27.4e-6, # damping
J => 154.1e-6, # coupling term
α => 3.867e-7, # Kerr nonlinearity
ω => 1.4507941, # pump frequency, resonant with antisymmetric mode (in paper, ħω0 + J)
η => -0.08 # pumping leaking to site 2 (F2 = ηF1)
)
varied = F0 => range(0.002, 0.03, 50)
result = get_steady_states(harmonic_eq, varied, fixed)A steady state result for 50 parameter points
Solution branches: 11
of which real: 3
of which stable: 2
Classes: stable, physical, HopfLet us first see the steady states.
p1 = plot(result, "u1^2 + v1^2", legend=false)
p2 = plot(result, "u2^2 + v2^2")
plot(p1, p2)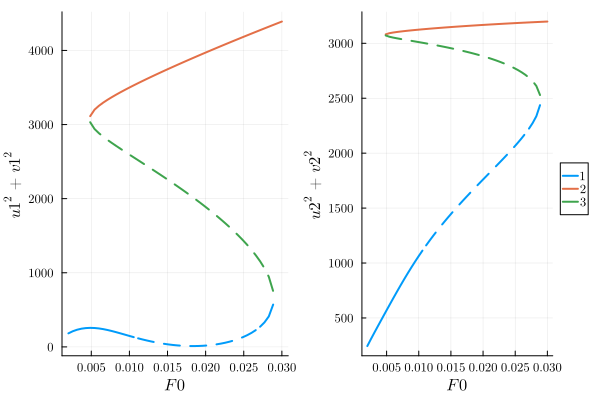
According to Zambon et al., a limit cycle solution exists around
Let us try and simulate the limit cycle. We could in principle run a time-dependent simulation with a fixed value of
using OrdinaryDiffEqTsit5
initial_state = result[1][1]
T = 2e6
sweep = AdiabaticSweep(F0 => (0.002, 0.011), (0,T))
# start from initial_state, use sweep, total time is 2*T
time_problem = ODEProblem(harmonic_eq, initial_state, sweep=sweep, timespan=(0,2*T))
time_evo = solve(time_problem, Tsit5(), saveat=100);Inspecting the amplitude as a function of time,
plot(time_evo, "sqrt(u1^2 + v1^2)", harmonic_eq)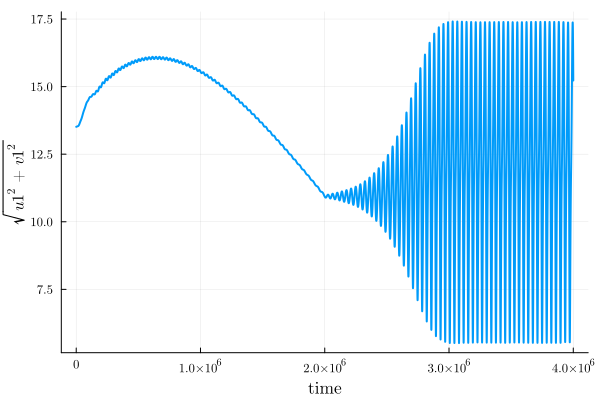
we see that initially the sweep is adiabatic as it proceeds along the steady-state branch 1. At around
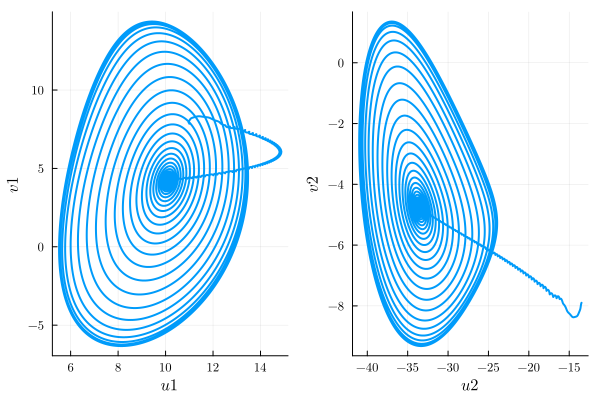
By plotting the
p1 = plot(time_evo, ["u1", "v1"], harmonic_eq)
p2 = plot(time_evo, ["u2", "v2"], harmonic_eq)
plot(p1, p2)