State dependent perturbation of the parametron
In this example, we will show how we can understand the bifurcation lines of two coupled duffing resonotors with a global parametric drive. This example is part of the paper Ameye et al. (arXiv:2501.08793).
Let us load the following packages into our environment:
using HarmonicBalance, Plots;
HB = HarmonicBalance;
crange = (0, 9);Later, we will need to classify the solutions of our perturbation. To make this work, we define our own classification functions:
function my_classify_default!(result)
my_classify_solutions!(result, HB.is_physical, "physical")
my_classify_solutions!(result, HB.is_stable, "stable")
return HB.order_branches!(result, ["physical", "stable"]) # shuffle the branches to have relevant
end
function my_classify_solutions!(res::HB.Result, f::Function, name::String)
values = my_classify_solutions(res, f)
return res.classes[name] = values
end
function my_classify_solutions(res::HB.Result, f::Function)
values = similar(res.solutions, BitVector)
for (idx, soln) in enumerate(res.solutions)
values[idx] = [
f(my_get_single_solution(res; index=idx, branch=b), res) for b in 1:length(soln)
]
end
return values
end
function my_get_single_solution(res; index, branch)
sol = get_single_solution(res; index=index, branch=branch)
return merge(
sol, Dict(ua => A[CartesianIndex(index)][1], va => A[CartesianIndex(index)][2])
)
endmy_get_single_solution (generic function with 1 method)We will consider two coupled linearly coupled parametrons, i.e., Duffing resonators with a global parametric drive. The equations of motion are given by:
where ω₀ represents the bare frequency of the system, which is the natural frequency at which the system oscillates in the absence of any external driving force. The parameter ω denotes the drive frequency, which is the frequency of an external driving force applied to the system. The parameter λ stands for the amplitude of the parametric drive, which modulates the natural frequency periodically. The parameter α represents the nonlinearity of the system, indicating how the system's response deviates from a linear behavior. The parameter J signifies the coupling strength, which measures the interaction strength between different parts or modes of the system. Finally, the parameter γ denotes the damping, which quantifies the rate at which the system loses energy to its surroundings.
With HarmonicBalance.jl, we can easily solve the phase diagram of the system in the limit where the modes oscillate at the frequency
@variables t x1(t) x2(t);
@variables ω0 ω λ α J γ;
equations = [
d(d(x1, t), t) + (ω0^2 - λ * cos(2 * ω * t)) * x1 + γ * d(x1, t) + α * x1^3 - J * x2,
d(d(x2, t), t) + (ω0^2 - λ * cos(2 * ω * t)) * x2 + γ * d(x2, t) + α * x2^3 - J * x1,
]
system = DifferentialEquation(equations, [x1, x2])
add_harmonic!(system, x1, ω)
add_harmonic!(system, x2, ω)
harmonic_normal = get_harmonic_equations(system)A set of 4 harmonic equations
Variables: u1(T), v1(T), u2(T), v2(T)
Parameters: ω, α, γ, ω0, λ, J
Harmonic ansatz:
x1(t) = u1(T)*cos(ωt) + v1(T)*sin(ωt)
x2(t) = u2(T)*cos(ωt) + v2(T)*sin(ωt)
Harmonic equations:
-J*u2(T) - (1//2)*u1(T)*λ + (2//1)*Differential(T)(v1(T))*ω + Differential(T)(u1(T))*γ - u1(T)*(ω^2) + u1(T)*(ω0^2) + v1(T)*γ*ω + (3//4)*(u1(T)^3)*α + (3//4)*u1(T)*(v1(T)^2)*α ~ 0
-J*v2(T) + Differential(T)(v1(T))*γ + (1//2)*v1(T)*λ - (2//1)*Differential(T)(u1(T))*ω - u1(T)*γ*ω - v1(T)*(ω^2) + v1(T)*(ω0^2) + (3//4)*(u1(T)^2)*v1(T)*α + (3//4)*(v1(T)^3)*α ~ 0
-J*u1(T) + Differential(T)(u2(T))*γ - (1//2)*u2(T)*λ + (2//1)*Differential(T)(v2(T))*ω + v2(T)*γ*ω - u2(T)*(ω^2) + u2(T)*(ω0^2) + (3//4)*(v2(T)^2)*u2(T)*α + (3//4)*(u2(T)^3)*α ~ 0
-J*v1(T) + (1//2)*v2(T)*λ - (2//1)*Differential(T)(u2(T))*ω + Differential(T)(v2(T))*γ - v2(T)*(ω^2) + v2(T)*(ω0^2) - u2(T)*γ*ω + (3//4)*(v2(T)^3)*α + (3//4)*v2(T)*(u2(T)^2)*α ~ 0We sweep over the system where we both increase the drive frequency
res = 80
fixed = HB.OrderedDict(ω0 => 1.0, α => 1.0, J => 0.005, γ => 0.005)
varied = HB.OrderedDict((ω => range(0.99, 1.01, res), λ => range(1e-6, 0.03, res)))
method = TotalDegree()
result_ωλ = get_steady_states(harmonic_normal, method, varied, fixed; show_progress=false);
plot_phase_diagram(result_ωλ; class="stable")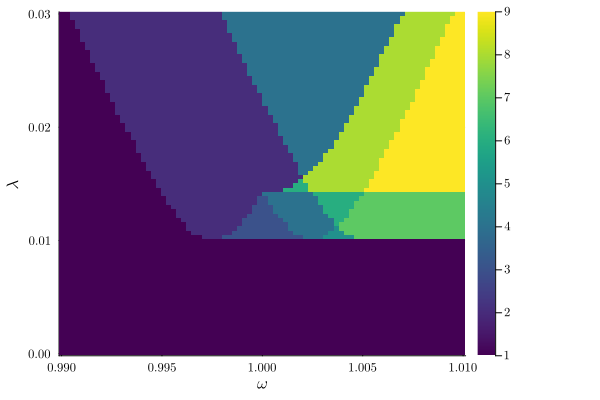
The phase diagram shows the number of stable steady states in the
λ_bif(ω, ω0, γ) = 2 * sqrt((ω^2 - ω0^2)^2 + γ^2 * ω^2)
plot_phase_diagram(result_ωλ; class="stable", xlims=(0.99, 1.01), ylims=(1e-6, 0.03))
plot!(
ω -> λ_bif(ω, √(fixed[ω0]^2 + fixed[J]), fixed[γ]),
range(0.99, 1.01, res);
label="",
c=:black,
ls=:dash,
)
plot!(
ω -> λ_bif(ω, √(fixed[ω0]^2 - fixed[J]), fixed[γ]),
range(0.99, 1.01, res);
label="",
c=:black,
ls=:dash,
)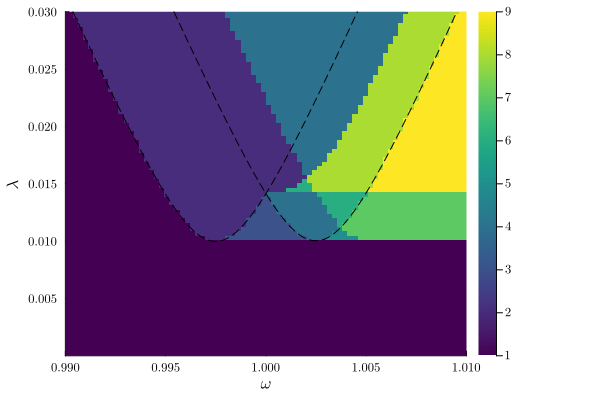
These frequencies where the lobes are centered around corresponds to the normal mode frequency of the coupled system. Indeed, when resonators are strongly coupled, the system is better described in the normal mode basis. However, in addition, we also find additional bifurcation lines in the phase diagram. These bifurcation lines we would like to understand with a state-dependent perturbation.
As the system, in the strongly coupled limit, is better described in the normal mode basis, let's us consider the symmetric and antisymmetric modes
Note that the system couples nonlinearly through the Kerr medium. However, solving the full system with HarmonicBalance.jl, expanding the normal modes in the the frequency
@variables t xs(t) xa(t);
@variables ω0 ω λ α J γ;
equations = [
d(d(xs, t), t) +
(ω0^2 - J - λ * cos(2 * ω * t)) * xs +
γ * d(xs, t) +
α * (xs^3 + 3 * xa^2 * xs),
d(d(xa, t), t) +
(ω0^2 + J - λ * cos(2 * ω * t)) * xa +
γ * d(xa, t) +
α * (xa^3 + 3 * xs^2 * xa),
]
system = DifferentialEquation(equations, [xs, xa])
add_harmonic!(system, xs, ω)
add_harmonic!(system, xa, ω)
harmonic_normal = get_harmonic_equations(system);
method = TotalDegree()
result_ωλ_normal = get_steady_states(
harmonic_normal, method, varied, fixed; show_progress=false
);
plot_phase_diagram(result_ωλ_normal; class="stable")
We would like to predict the additional bifurcation lines above by doing a proper perturbation of the nonlinear coupling. Hence, we consider the uncoupled system by removing the coupled terms in the equations of motion.
@variables t xa(t) xs(t);
@variables ω0 ω λ α J;
equations_xa = [
d(d(xa, t), t) + (ω0^2 + J - λ * cos(2 * ω * t)) * xa + γ * d(xa, t) + α * xa^3
]
equations_xs = [
d(d(xs, t), t) + (ω0^2 - J - λ * cos(2 * ω * t)) * xs + γ * d(xs, t) + α * xs^3
]
system_uncoupled = DifferentialEquation(append!(equations_xs, equations_xa), [xs, xa])
add_harmonic!(system_uncoupled, xa, ω)
add_harmonic!(system_uncoupled, xs, ω)
harmonic_uncoupled = get_harmonic_equations(system_uncoupled);
plot_phase_diagram(
get_steady_states(harmonic_uncoupled, method, varied, fixed; show_progress=false);
class="stable",
xlims=(0.99, 1.01),
ylims=(1e-6, 0.03),
)
plot!(
ω -> λ_bif(ω, √(fixed[ω0]^2 + fixed[J]), fixed[γ]),
range(0.99, 1.01, res);
label="",
c=:black,
ls=:dash,
)
plot!(
ω -> λ_bif(ω, √(fixed[ω0]^2 - fixed[J]), fixed[γ]),
range(0.99, 1.01, res);
label="",
c=:black,
ls=:dash,
)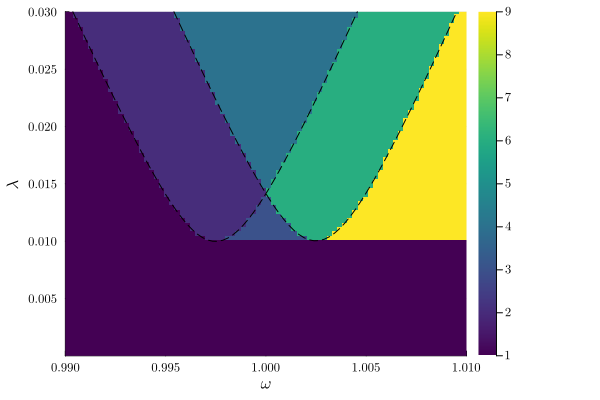
Let us assume that the antisymmetrcic mode is in the parametric non-zero amplitude state. We will dress the symmetric mode with the non-zero amplitude solution of the antisymmetric mode.
equations_xa = [
d(d(xa, t), t) + (ω0^2 + J - λ * cos(2 * ω * t)) * xa + γ * d(xa, t) + α * xa^3
]
equations_xs = [
d(d(xs, t), t) + (ω0^2 - J - λ * cos(2 * ω * t)) * xs + γ * d(xs, t) + α * xs^3
]
system_xa = DifferentialEquation(equations_xa, [xa])
system_xs = DifferentialEquation(equations_xs, [xs])
add_harmonic!(system_xa, xa, ω)
add_harmonic!(system_xs, xs, ω)
harmonic_antisym = get_harmonic_equations(system_xa);
harmonic_sym = get_harmonic_equations(system_xs);The uncoupled antisysmmetic mode will have a typical parametron phase diagram around the frequency
result_ωλ_antisym = get_steady_states(harmonic_antisym, varied, fixed);
classify_solutions!(result_ωλ_antisym, "sqrt(u1^2 + v1^2) > 1e-3", "not_zero")
plot_phase_diagram(result_ωλ_antisym; class=["stable", "not_zero"])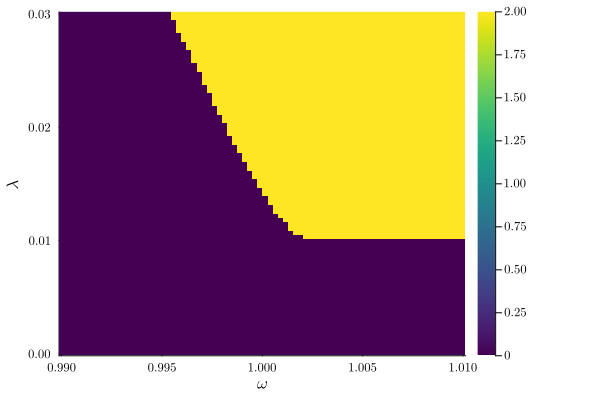
We filter the non-zero amplitude solution and store it in a matrix
branch_mat = findfirst.(HB._get_mask(result_ωλ_antisym, ["stable", "not_zero"], []))
A = map(CartesianIndices(result_ωλ_antisym.solutions)) do idx
branch = branch_mat[idx]
if isnothing(branch)
sol = zeros(2)
else
sol = real(result_ωλ_antisym.solutions[idx][branch])
end
sol
end;
heatmap(map(v -> v[1]^2 + v[2]^2, A)')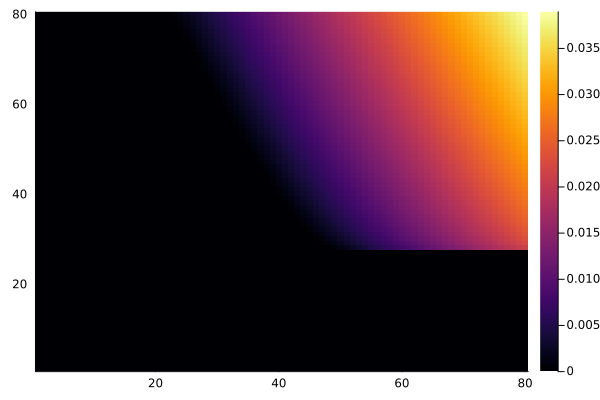
The next step is to dress the symmetric mode with the non-zero amplitude solution of the antisymmetric mode. For this we set up a perturbed problem for the symmetric mode:
@variables T u2(T) v2(T) ua va
harmonic_tmp = deepcopy(harmonic_sym)
harmonic_tmp.equations = HB.Symbolics.substitute(
HB.rearrange_standard(harmonic_normal).equations[1:2], Dict(u2 => ua, v2 => va)
)
harmonic_tmp.parameters = push!(harmonic_tmp.parameters, ua, va)
prob = HarmonicBalance.Problem(harmonic_tmp, varied, fixed)2 algebraic equations for steady states
Variables: u1, v1
Parameters: ω, ω0, J, λ, α, γ, ua, vaWe will sweep over the
all_keys = cat(collect(keys(varied)), collect(keys(fixed)); dims=1)
permutation =
first.(
filter(
!isempty, [findall(x -> isequal(x, par), all_keys) for par in prob.parameters]
)
)
param_ranges = collect(values(varied))
input_array = collect(Iterators.product(param_ranges..., values(fixed)...))
input_array = getindex.(input_array, [permutation])
input_array = HB.tuple_to_vector.(input_array)
input_array = map(idx -> push!(input_array[idx], A[idx]...), CartesianIndices(input_array));Solving for the steady states of the dressed symmetric mode:
function solve_perturbed_system(prob, input)
result_full = HB.ProgressMeter.@showprogress map(input_array) do input
HB.HomotopyContinuation.solve(
prob.system;
start_system=:total_degree,
target_parameters=input,
threading=false,
show_progress=false,
)
end
rounded_solutions = HB.HomotopyContinuation.solutions.(result_full)
solutions = HB.pad_solutions(rounded_solutions)
jacobian = HarmonicBalance.get_Jacobian(harmonic_tmp)
J_variables = cat(prob.variables, collect(keys(varied)), [ua, va]; dims=1)
compiled_J = HB.compile_matrix(jacobian, J_variables; rules=fixed)
compiled_J = HB.JacobianFunction(HB.solution_type(solutions))(compiled_J)
result = HB.Result(
solutions,
varied,
fixed,
prob,
Dict(),
zeros(Int64, size(solutions)...),
compiled_J,
HB.seed(method),
)
my_classify_default!(result)
return result
end
result = solve_perturbed_system(prob, input_array)
plot(
plot_phase_diagram(result_ωλ_normal; class=["stable"], colorbar=false),
plot_phase_diagram(result; class=["stable"], colorbar=false);
clim=crange,
size=(800, 300),
)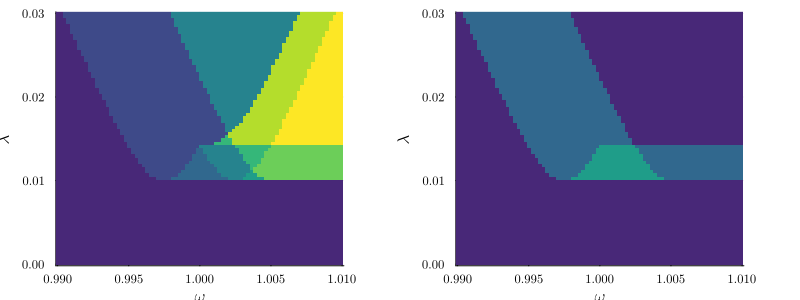
We see that the perturbed symmetirc mode gives the same bifurcation lines as the full system. Hence, the nonlinear normal mode coupling instantiates a new bifurcation in the system. For more detail consider reading the paper Ameye et al. (arXiv:2501.08793) where we explore and explain the bifurcation line of the coupled Kerr/Duffing parametric oscillators.
This page was generated using Literate.jl.